M5StackでAE-MOTOR88302個をBlinkで遠隔操作 [Arduino&M5Stack]
注意
Arduinoでは、16進数を右に1ビットシフトする
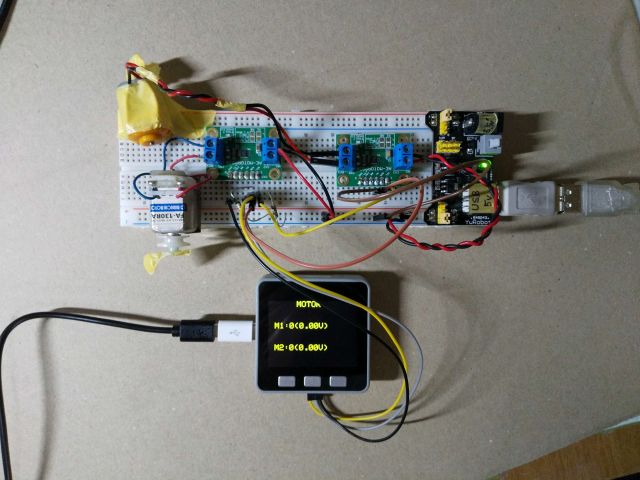
配線
2つのモータードライバーに並列に5V GND SCL SDAを配置
絵は後程追加
ディスプレイにも電圧が表示されます
ソースコード
//参考 //https://spiceman.jp/arduino-drv8830-program/ //https://yujimiyano.tumblr.com/post/89433536983/konashi-2-i2c-ae-drv8830-dc //https://makers-with-myson.blog.ss-blog.jp/2014-05-15 // #include <Wire.h> #include <M5Stack.h> // I2Cアドレス #define DRV8830_1 0x64 // DRV8830のI2Cアドレス1 #define DRV8830_2 0x61 // DRV8830のI2Cアドレス2 #define CONTROL 0x00 // CONTROLレジスタのサブアドレス #define FAULT 0x01 // FAULTレジスタのサブアドレス int power1_1 = 0; // +-63諧調あるがBlynkでは+-10諧調 int power1_2 = 0; // power1_1の値が変わっているかを調べるために変数power1_2を作成 //⇑左(0x64) //⇓右(0x61) int power2_1 = 0; int power2_2 = 0; // #define BLYNK_PRINT Serial #define BLYNK_USE_DIRECT_CONNECT //#include <M5Stack.h> //追加部分 上記にあるので削除 #include <BlynkSimpleEsp32_BLE.h> //追加部分 #include <BLEDevice.h> //追加部分 #include <BLEServer.h> //追加部分 char auth[] = "k2sr_8wGTqfHzV9oTpD5Z4f-vh1vUu3i";//追加部分 // void setup() { M5.Speaker.begin(); // これが無いとmuteしても無意味です。 M5.Speaker.mute(); Serial.begin(9600); //追加部分 //Serial.begin(115200); Blynk.setDeviceName("Blynk"); //追加部分 Blynk.begin(auth); //追加部分 Wire.begin(); //I2Cを使う宣言 M5.begin(); //M5 Stackを使う宣言 M5.Lcd.setTextColor(YELLOW), M5.Lcd.setTextSize(3), M5.Lcd.setCursor(100, 0); M5.Lcd.print("MOTOR"); powerdisplay(); } void loop() { Blynk.run(); //追加部分 M5.update(); if (power1_1 != power1_2) { powerdisplay(); if (power1_1 > 0) { writeRegister(1 ,CONTROL, 0x04 + power1_1, 0x01); } else if (power1_1 == 0) { writeRegister(1 ,CONTROL, 0x00, 0x00); } else if (power1_1 < 0) { writeRegister(1 ,CONTROL, 0x04 + power1_1 * -1, 0x02); } power1_2 = power1_1; } if (power2_1 != power2_2) { powerdisplay(); if (power2_1 > 0) { writeRegister(2 ,CONTROL, 0x04 + power2_1, 0x01); } else if (power2_1 == 0) { writeRegister(2 ,CONTROL, 0x00, 0x00); } else if (power2_1 < 0) { writeRegister(2 ,CONTROL, 0x04 + power2_1 * -1, 0x02); } power2_2 = power2_1; } delay(100); } void writeRegister(byte MotorNumber , byte reg, byte vset, byte DATA) { int vdata = vset << 2 | DATA; Serial.println(String(vdata, HEX)); if (MotorNumber == 1) { Wire.beginTransmission(DRV8830_1); Serial.println("MOTOR_A"); } else if (MotorNumber == 2) { Wire.beginTransmission(DRV8830_2); Serial.println("MOTOR_B"); } Wire.write(reg); Wire.write(vdata); Wire.endTransmission(true); } void powerdisplay() { M5.Lcd.fillRect(0, 80, 320, 160, BLACK); M5.Lcd.setTextColor(YELLOW), M5.Lcd.setTextSize(3.5), M5.Lcd.setCursor(20, 80), M5.Lcd.print("M1:") , M5.Lcd.print(power1_1); if (power1_1 == 0) { M5.Lcd.print("(0.00V)"); } else if (power1_1 > 0) { M5.Lcd.print("("), M5.Lcd.print(power1_1 * 0.08 + 0.4), M5.Lcd.print("V)"); } else if (power1_1 < 0) { M5.Lcd.print("(-"), M5.Lcd.print((power1_1 * -1) * 0.08 + 0.4), M5.Lcd.print("V)"); } M5.Lcd.setCursor(20, 160), M5.Lcd.print("M2:") , M5.Lcd.print(power2_1); if (power2_1 == 0) { M5.Lcd.print("(0.00V)"); } else if (power2_1 > 0) { M5.Lcd.print("("), M5.Lcd.print(power2_1 * 0.08 + 0.4), M5.Lcd.print("V)"); } else if (power2_1 < 0) { M5.Lcd.print("(-"), M5.Lcd.print((power2_1 * -1) * 0.08 + 0.4), M5.Lcd.print("V)"); } } //追加部分 BLYNK_WRITE(V0) { //V0の値を取得する power1_1 = param[0].asInt(); // V2の値をPowerに入れる Serial.print("1_"); Serial.println(power1_1); } BLYNK_WRITE(V1) { //V0の値を取得する power2_1 = param[0].asInt(); // V2の値をPowerに入れる Serial.print("2_"); Serial.println(power2_1); }
2021-01-16 13:54
nice!(0)
コメント(0)




コメント 0